探索系列(一):APP 进阶玩法
一、前言
“嘿,未来的机器狗训练大师!您已经和哮天一起踏上了探索之旅,熟悉了它的启动、互动及使用过程,这无疑为生活增添了许多乐趣。现在,让我们更进一步来玩转动作编辑,为哮天创造更多独一无二的动作组!”
二、准备工作
| 步骤 | 详细介绍 |
|---|---|
| 软件:下载好 APP 并根据提示安装 |  |
| 环境:哮天已联网并已成功连接手机 app | 此文档不再对基础配置等使用操作进行阐述,相关资料请参考此文档:开箱大放送 |
三、关键帧模式
关键帧模式(编辑模式):提供了更精准的控制能力,允许调整哮天每一帧的动作细节:包括速度、加速度、停顿时间以及角度等参数;编辑参数的同时会把数值发送到机身同步调整。这种模式使得每一帧动作都能得到精准调整,从而实现更高精度和高控制度。
用户可根据效果视频熟悉关键帧模式的使用,下文为文字版的步骤拆解,如有疑问可参考详情。
3.1 进入关键帧模式
| 示例图 | 操作描述 |
|---|---|
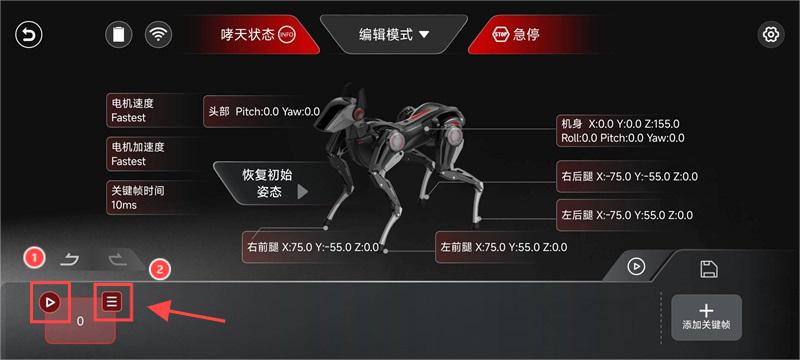
 | 标注一:通过顶栏切换到编辑模式;标注二:进入页面后提示恢复初始姿态,按“确认”即可。编辑页面展示了哮天在初始姿态时的关节参数,供用户在编辑动作时作为参考依据 |
3.2 新建关键帧
| 示例图 | 操作描述 |
|---|---|
 | **标注一:(新建关键帧)**点击 “添加关键帧”进入编辑页面;**标注二:(编辑页面)**用户可在页面修改头部、机身、右后腿、左后腿、左前腿、右前腿的 XYZ 三轴参数并创建哮天一帧的关键帧,并进行保存、另存为、删除等操作。 |
3.3 示例关键帧(拆解步骤)
以下为创造一帧哮天的抬头扭屁股的关键帧示例,具体参数值仅供参考。
| 关节 | 参数定义 |
|---|---|
| 头部 | Yaw:控制颈部左右转动、Pitch:控制头部上下运动。 |
| 机身 | Roll:控制机身的滚转运动、Pitch:控制机身的俯仰运动、Yaw:控制机身的偏航运动。 |
| 腿部 | X轴:控制腿部前后移动、Y轴:控制腿部左右摆动、Z轴:控制腿部上下活动。 |
了解我们可修改的关节部位、参数及它的定义后就开始创造一帧新的关键帧啦!
| 操作步骤 | 示例图(上下为修改对比图) |
|---|---|
第一步编辑头部参数:我们要实现一帧哮天抬头扭屁股的关键帧。为此头部需修改 Pitch 参数来实现抬起,同时为了让哮天看起来更加灵动,对 Yaw 参数进行修改实现颈部左右转向功能。 |  |
第二步编辑机身参数:头部抬起时,为了让整体动作更加协调尝试机身也修改 Pitch 参数,以机身尾部的屁股抬高,前部低下的姿态去实现扭屁股的动作,而在颈部我们还添加 Yaw 参数,机身也可以微调此参数。 | 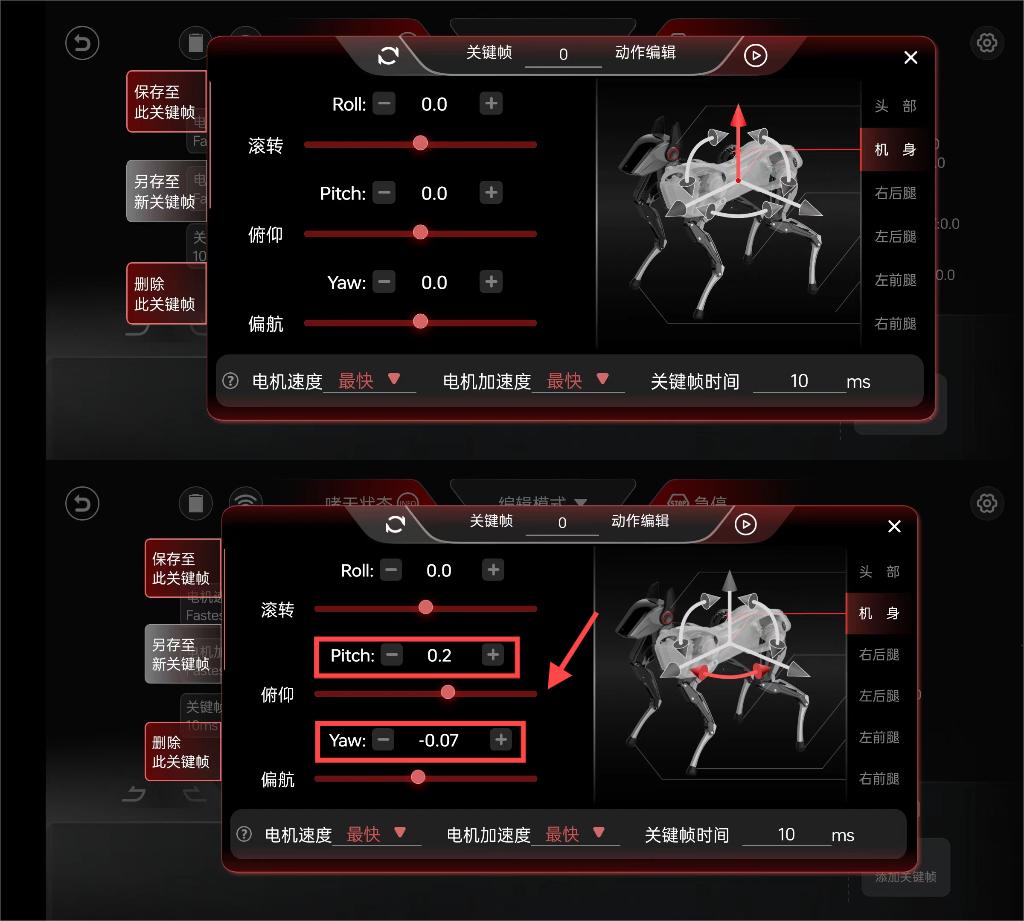 |
第三步编辑四足参数:调整时需注意各腿部的原始参数,以确保动作自然协调。腿部可进行修改的有左后腿、右后腿、左前腿及右前腿,配合机身的姿势需调整腿部的上下参数,将前腿的位置调低、后腿的位置调高让哮天��实现扭屁股的姿态。
| 右后腿示意图 | 左后腿示意图 |
|---|---|
 |  |
但此时在微调的过程中我们发现后腿调高后,哮天可能会出现站不稳的情况。这时可微调后腿的前后、左右参数,让后腿的支撑面更广并站的更稳当。
| 左前腿示意图 | 右前腿示意图 |
|---|---|
 |  |
完成所有的调整参数后,我们可以将关键帧调整到 200ms 来观察哮天,在 200ms 内我们可以。
| 步骤 | 示例图 |
|---|---|
| 第四步保存关键帧:编辑完成后点击左侧的保存按键(标注一)进行这一帧的关键帧保存。 |  |
| 第五步播放关键帧:点击左上角播放图标(三角形)后会进行对此关键帧进行播放操作。 | 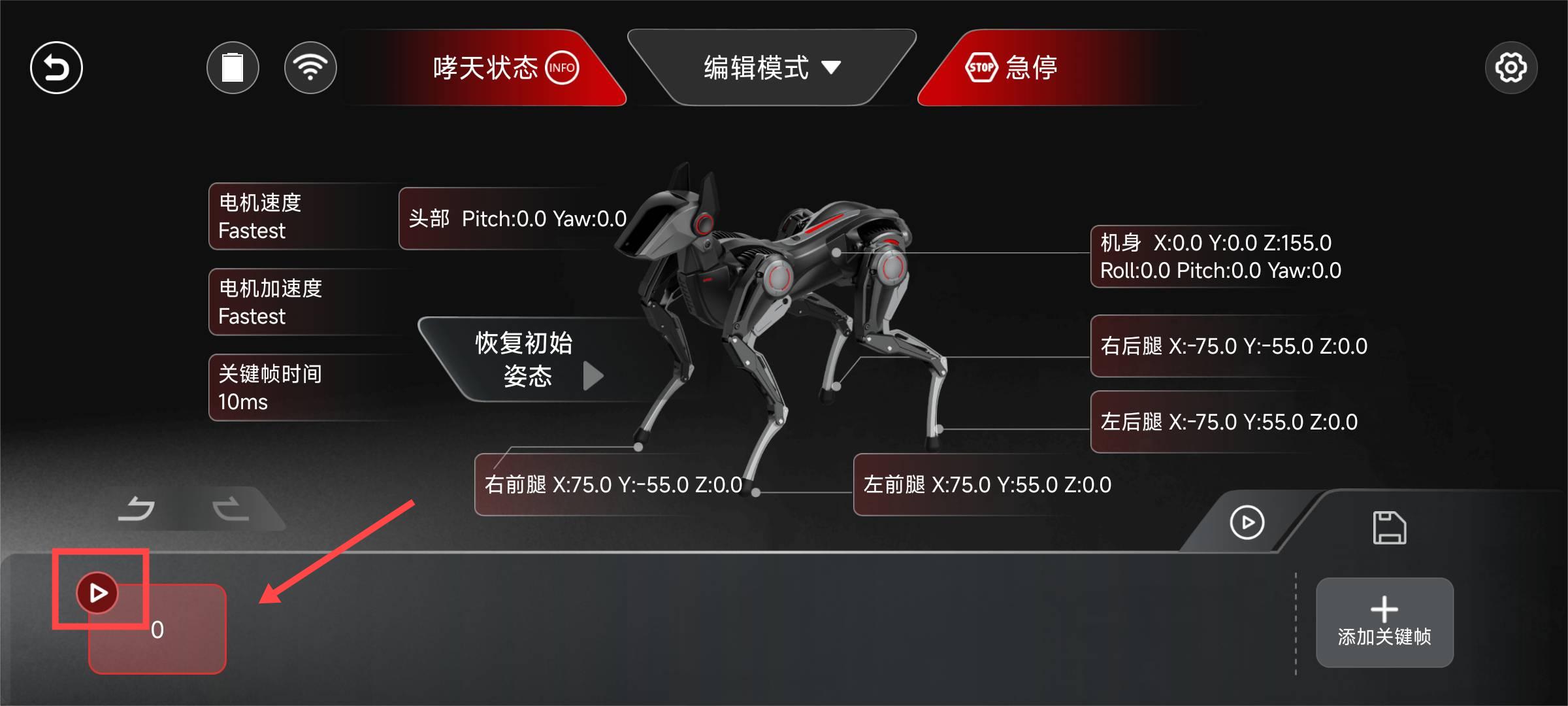 |
3.4 调整参数项
- 标注一:先点击播放键后会弹出编辑键。
- 标注二:点击即可进入参数编辑页面。
- 调整电机参数
| 参数项 | 相关含义及操作 | 备注 |
|---|---|---|
 | ||
| 调节电机速度(标注一) | 电机速度调节有四个选项:最快、快、慢、最慢 | 如果将电机速度调至最快,电机的反应速度最快,也就代表会快速完成动作组的动作。以此类推,如果将电机速度调至最慢,而动作组的动作则会以缓慢且丝滑的状态完成。 |
| 调节电机加速度(标注二) | 电机加速度调节有四个选项:最快、快、慢、最慢 | |
| 调节关键帧时间(标注三) | 可在此调节关键帧��的时间,建议以200ms为一帧的时间。 |
- 保存、另存为、删除关键帧
| 参数项 | 相关含义及操作 |
|---|---|
| |
| 标注一:保存至此关键帧 | 点击此选项可将当前编辑的关键帧保存至当前动作序列中。 |
| 标注二:另存至新关键帧 | 选择此选项可以将当前编辑的关键帧作为一个新的独立关键帧保存。 |
| 标注三:删除此关键帧 | 点击此选项可从动作序列中移除当前选择的关键帧。 |
四、结语
"以上内容是关于进阶遥控玩法的使用指南。对于好奇的用户来说,了解这些遥控操作背后的原理同样重要。因此,我们接下来将探讨遥控操作的核心——遥控 API 接口。让我们一起探索吧!"