探索系列(四):Blender 入门
一、前言
本篇文档阐述了如何使用 Blender 来编辑哮天的炫酷动作,并与哮天进行联合调试。文档还将展示如何通过 Python 脚本导出并播放动作,以实现哮天炫酷动作的自动化演示。为了帮助用户更高效地设计并掌握哮天的动作编辑,我们先解 Blender 可以实现什么效果吧!
二、效果展示
三、快速体验动作组
当我们了解完 blender 能实现的效果后,此时您是否想给您的哮天复刻这些有趣动作?
请跟随 HENGBOT 一起随着文档来快速体验动作组!
3.1.准备工作
基础知识
- 请您先阅读开箱系列使用文档:基础配置使用 了解哮天机器狗的基础配置和使用方法。
- 本文档需要具备Python语言编程基础,能够配置编程环境并运行程序。
硬件需求
- 一台哮天机器人。
- 一台 Windows 系统的个人电脑。
使用环境
使用前请保证哮天以正确的初始姿势放置在平稳地面上,用户可取下包装箱的泡棉起到保护作用,使用途中也请勿让产品受到过度冲击,例如从高处跌落或碰撞等;

软件准备
软件准备分为两大块:一部分是在机器狗哮天的使用准备、一部分是 PC 端上的软件准备。
- 哮天开机并联网
| 软件准备 | 文档参考 | 示例图 |
|---|---|---|
| 哮天开机与充电 | 相关操作步骤请参考使用文档 |  |
| 哮天联网(如开机未出现联网页面:根据参考资料手动进入WiFi模式。 | 联网相关操作步骤请参考文档.tips:可使用以下工具进行生成二维码。 | 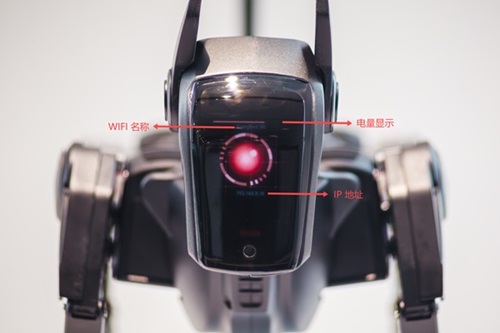 |
- 安装 Blender 并下载工程包
| 操作步骤 | 下载链接 |
|---|---|
| 安装 Blender:(演示版本:4.2.2-Windows)根据右侧点击下载安装包并完成安装。 | 点击下载 |
| 下载工程包:此工程是已配置好舞蹈动作用于快速体验哮天的舞蹈,下载后记得对压缩包进行解压操作,这里可将工程包解压保存至与Blender 相同路径目录,方便后续使用。 | 工程包zip待补 |
3.2 连接哮天并播放动作组
准备工作结束后,接下来将哮天与 Blender 软件连接快速体验动作组,让哮天动起来!
视频
| 操作步骤 | 示意图 |
|---|---|
| 第一步:双击点开解压后的初始工程 | 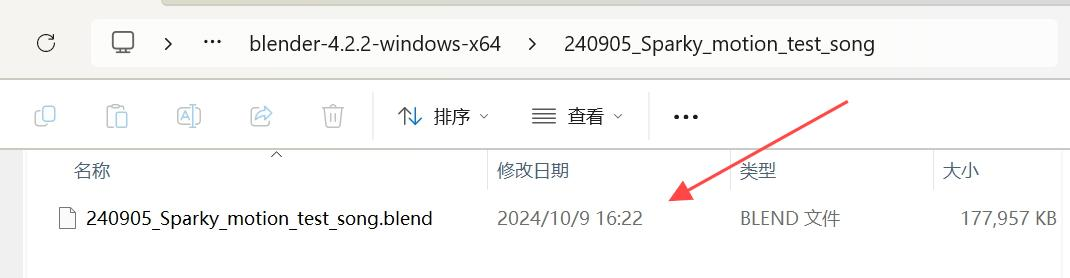 |
| 第二步:根据标注一将 IP 地址修改为当前哮天头部 IP 地址,点击标注二播放键启动。 | 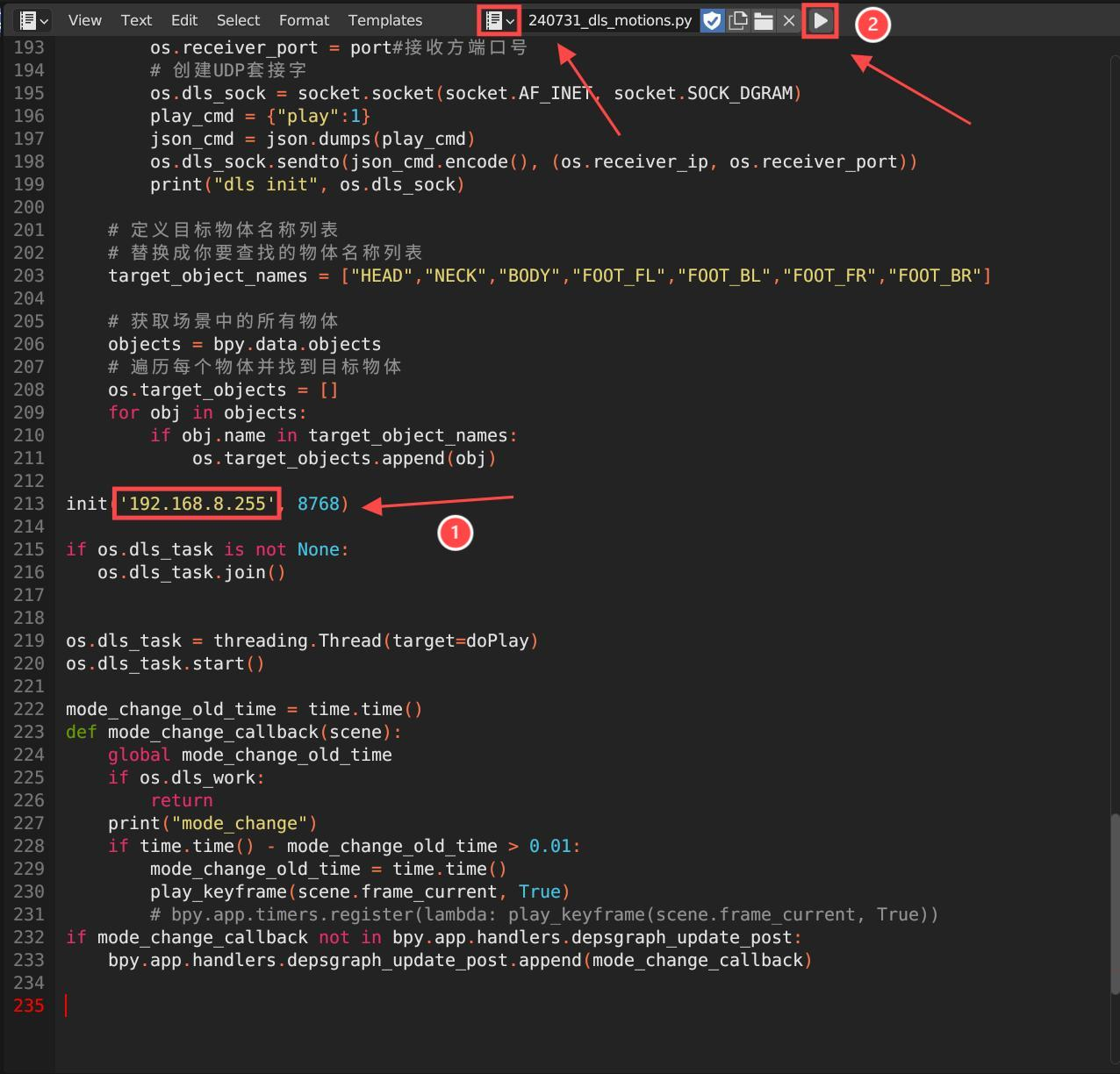 |
| 第三步:根据图例标注一二关闭blender 并保存相关代码。 | 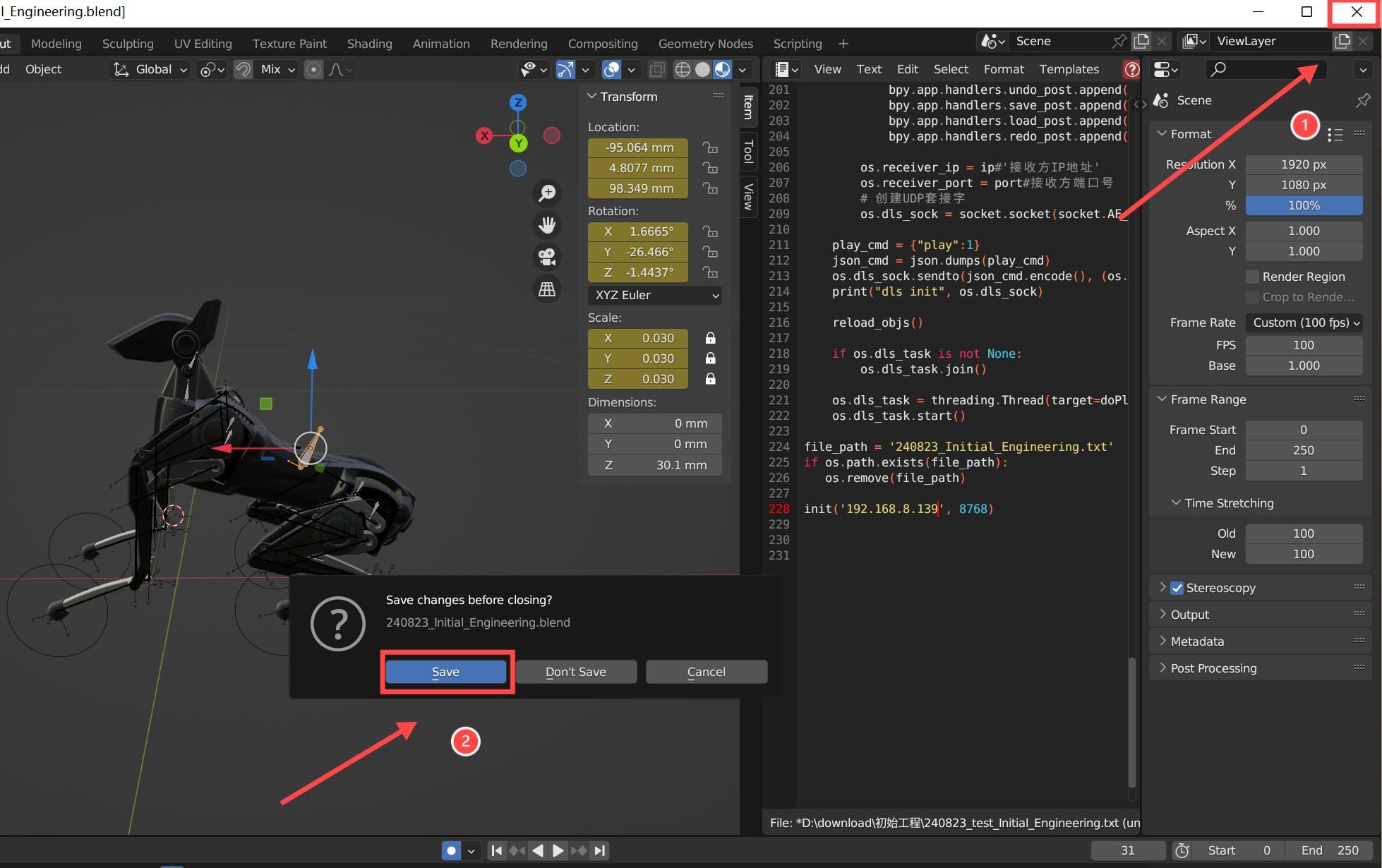 |
| 第四步:再次打开 Blender 工程根据标注一点击运行键,点击标注二播放动作组,此��时您会看见哮天同步复现工程的动作组! (标注一:运行此工程的程序代码,也包括了连接哮天等操作;标注二:播放/暂停动作。) | 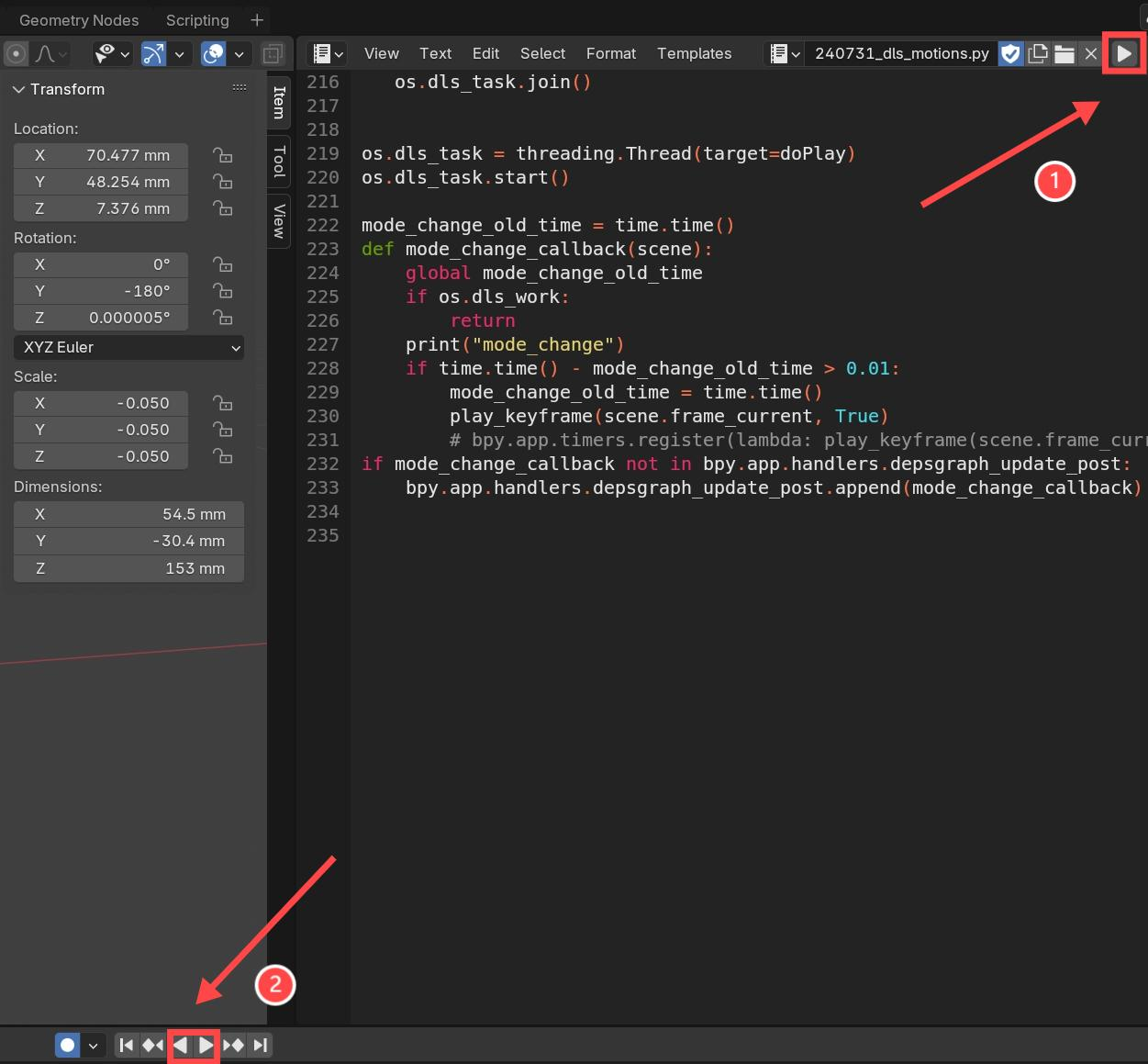 |
四、如何让哮天实现“动起来”
体验完 Blender 的丝滑动作组后,您是否也想为哮天创造一套专属的动作组呢? 那就请跟随文档学习如何让哮天动起来吧。
4.1 导入初始工程包
开始进入实操阶段前,我们需要提前进行一些准备工作。
1. 下载并打开新的工程包。
2. 根据前文的连接步骤更换IP地址重新连接哮天,具体步骤在此不再赘述。
4.2 哮天“动起来”编辑步骤
启动工程包后,我们可以看见初始工程包已内置好站立的初始帧。
我们可知从**站立->趴下**这是由两个动作组成的,而初始工程默认哮天是站立姿势,所以只需编排“趴下”姿态即可。
视频待补
在使用 Blender 编辑动作时,动作会自动同步到哮天实机上。为了避免因动作幅度过大而引发实机的弹跳、跌落或碰撞等问题,建议在进行以下操作时格外小心,或者尽量采用缓慢的操作方式。
- 编辑时请勿大幅度的拉动或调整,容导致哮天直接与 Blender 连接中断。
- 在进行任意新操作之前,请先将光标移至模型编辑区之外的安全区域。这样做可以避免因操作时不小心拉动光标,导致哮天实机意外弹起或跌落,从而损坏机身。
- 如出现掉线情况,请点击右上角的运行键再次运行脚本即可连接。
- 如采用100hz作为编排目标帧率时,由于电脑性能原因实时预览可能低于100hz,左上角显示只有60fps左右,这会导致最终导出的动作与编排时预览的速度不一致,需要在编排时提前考虑。
| 操作步骤 | 示意图 | 备注 |
|---|---|---|
第一步:图例是时间线编辑器,参考标注一将蓝色块拖到 100 新建关键帧。0-100:这里默认时间一秒为100,也可缩减到75。 | 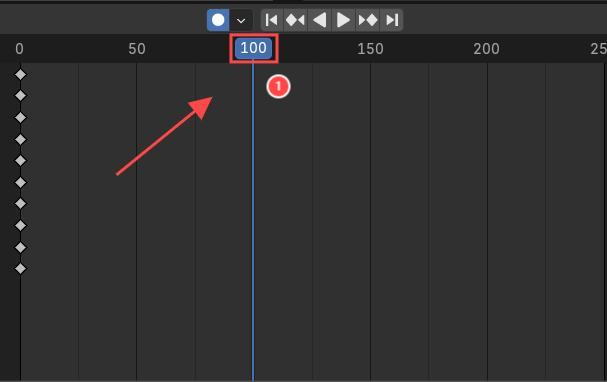 | 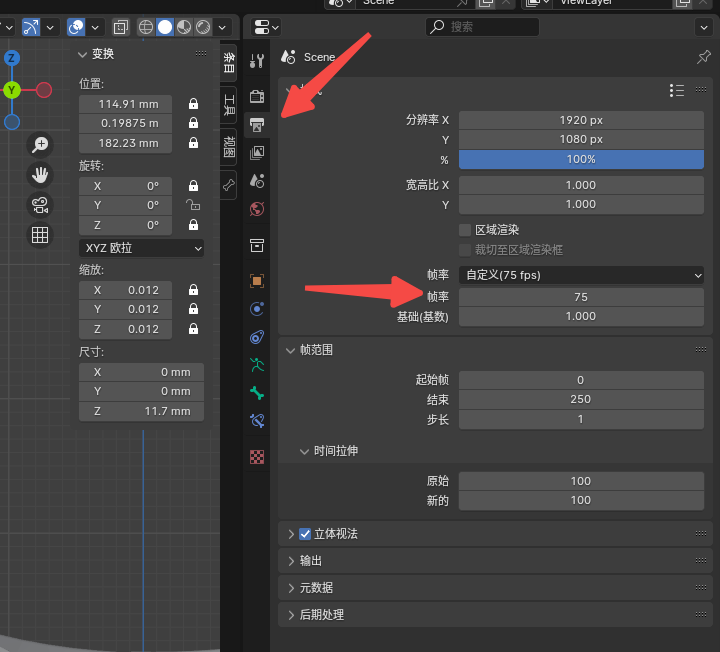 |
第二步:选中标注一(高亮状态)此时将光标往下拖动让哮天实现整体下蹲的姿势,再将光标往右拉动将重心后移。因下蹲跟后移重心的参数数值不好理解,这里数值范围可参考标记二:演示参数。 | 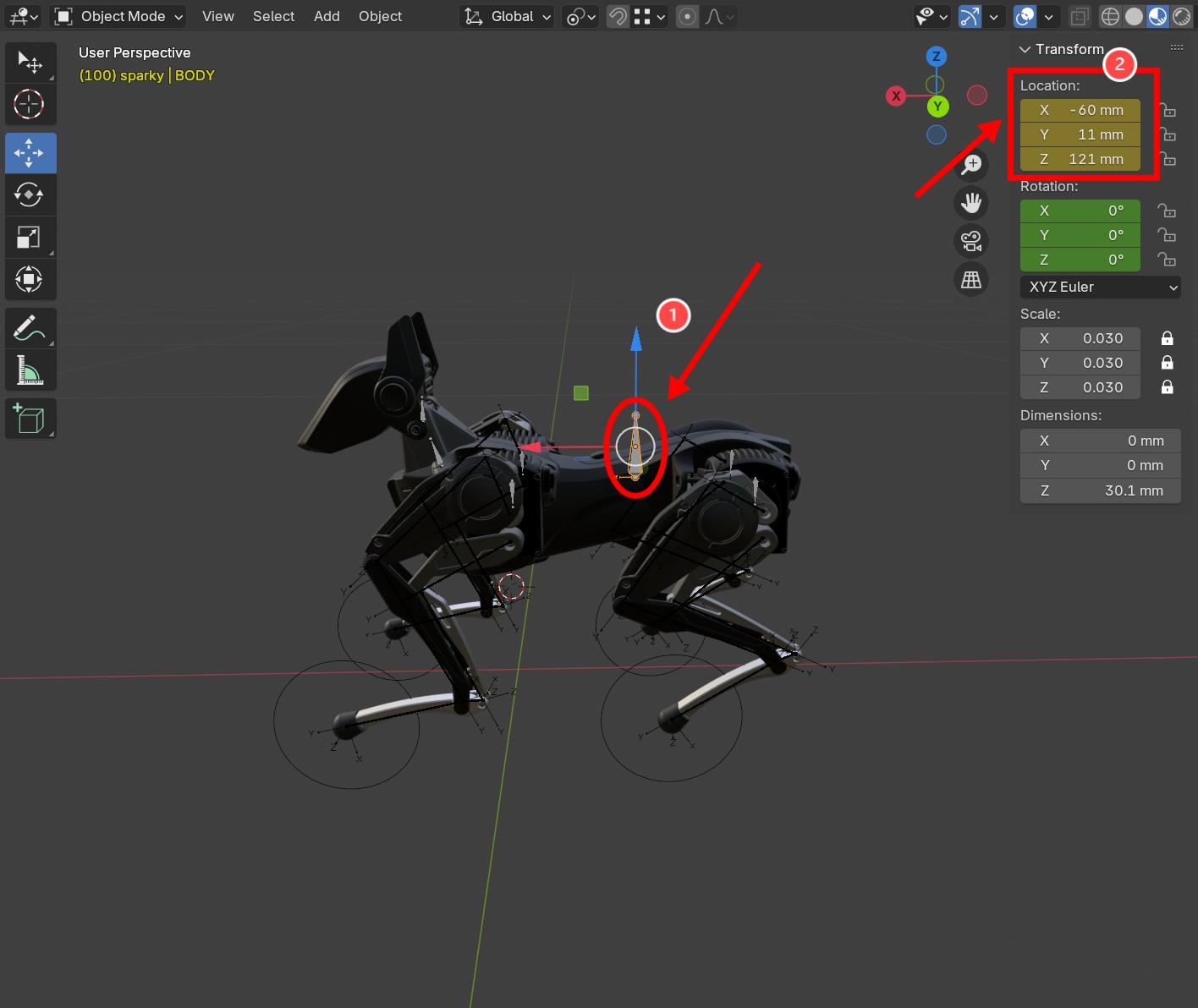 | |
第三步:初始工程默认是标注一“移动模式”,此模式只支持上下左右平移。请切换到标注二“旋转模式”,再根据**“标注三”**将哮天调整为趴下姿势。注释:标注一:移动模式\标注二:旋转模式\标注四:演示参数 | 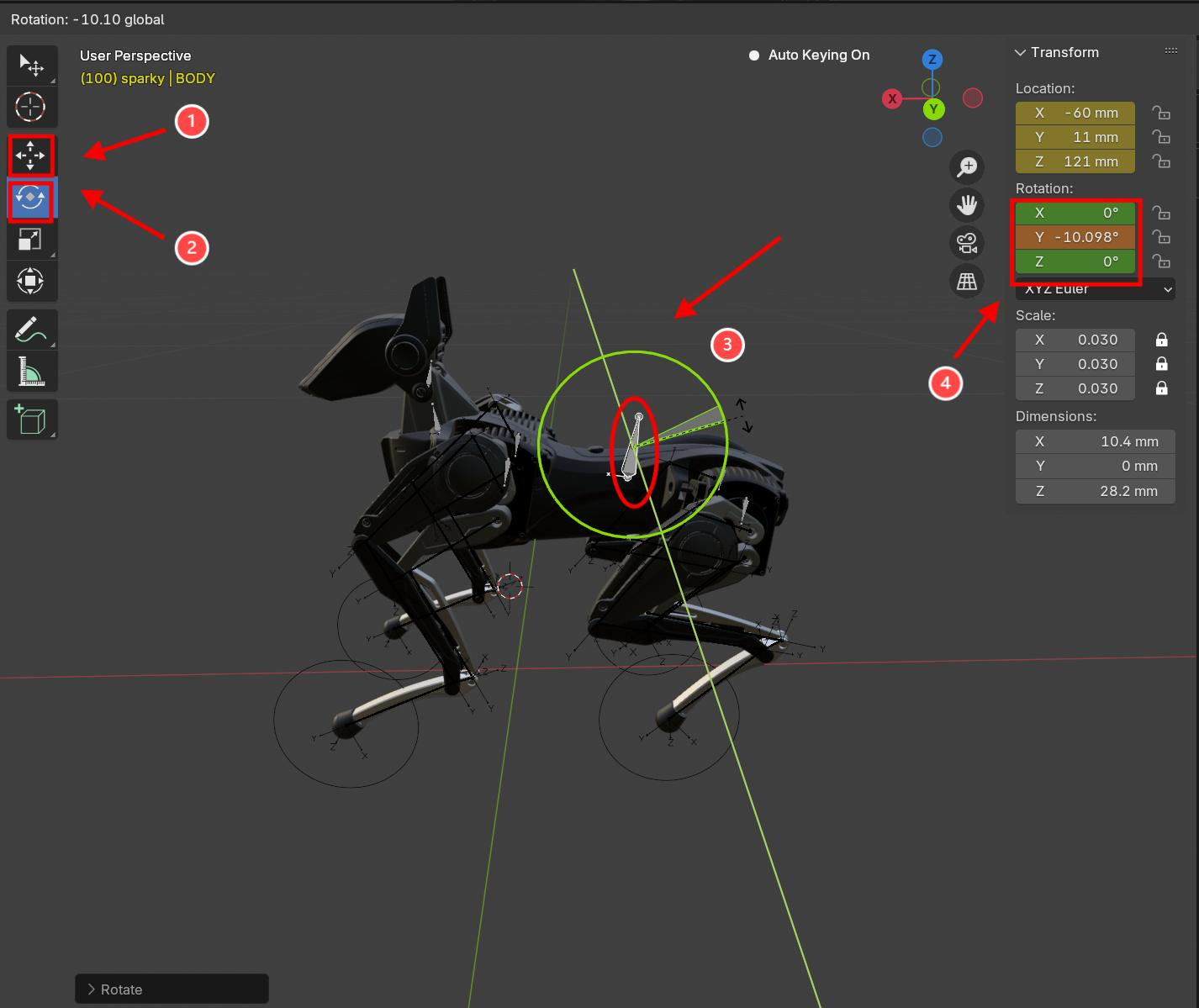 |   |
第四步:上文调整后哮天初具坐下的形态,此时来进行最后的微调。切回标注一“移动模式”,利用标注二(三色参考线)调整到期望的位置和效果。调整完毕后点击标注五的“播放键”开始播放动作即可。注释:标注一:切换移动/旋转模式、标注二:模型视角切换、标注四:演示参数、标注五:播放暂停按键++(空格播放暂停) | 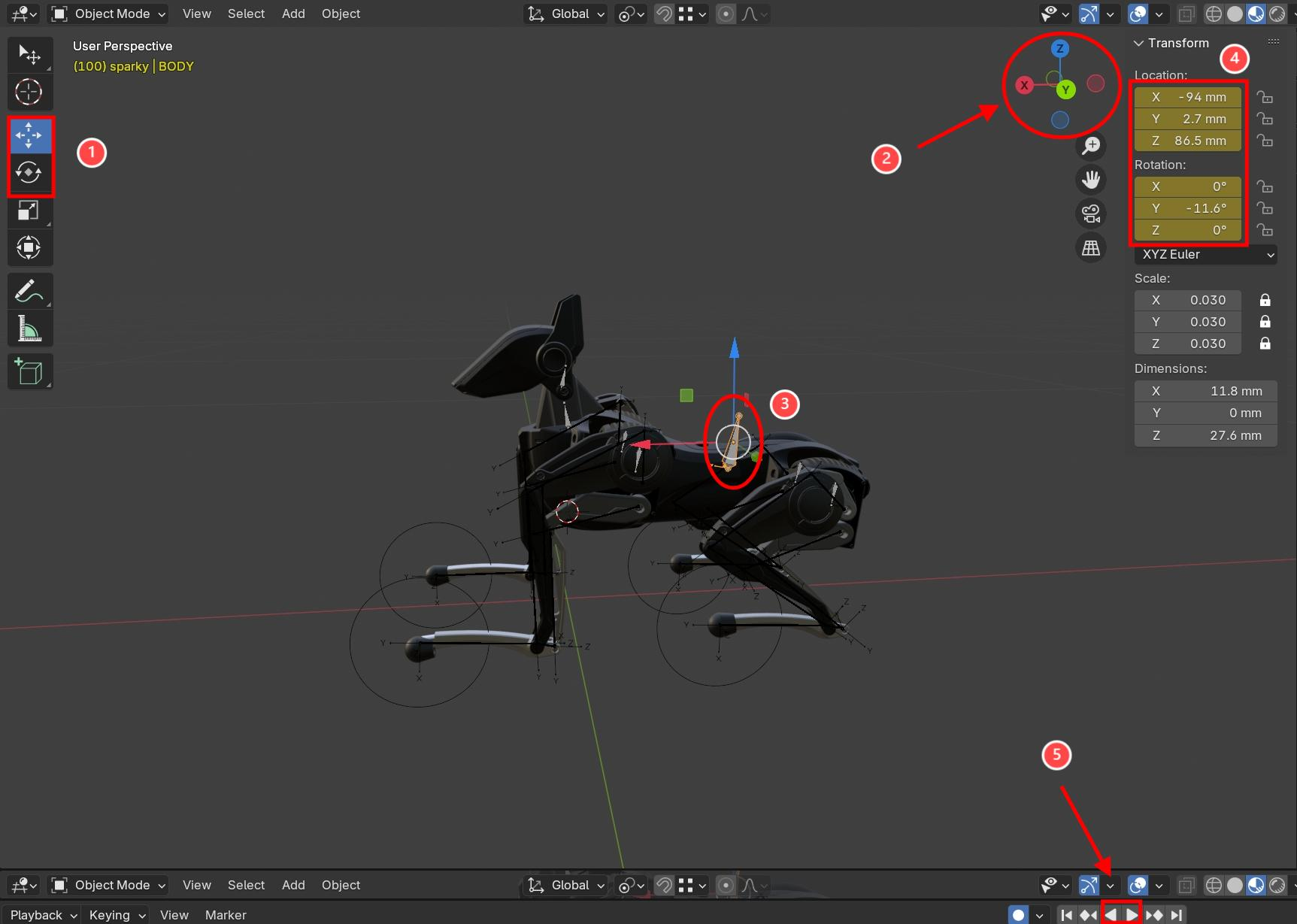 | 视频待补 |
在编辑完哮天趴下的关键帧后,我们接下来要实现的是让哮天从趴姿过渡到站立,完成整个动作组流程。你可能会好奇?是否只需复制站立的关键帧就能实现这一动作?让我们接着往下看。
| 操作步骤 | 示意图 | 备注(原理点) |
|---|---|---|
| 第一步:根据标注一选中0帧复制并粘贴到200数值的帧上,此时点击播放会发现哮天的姿势没有完全站起,也没有完全坐下。(原理普及请看备注) | 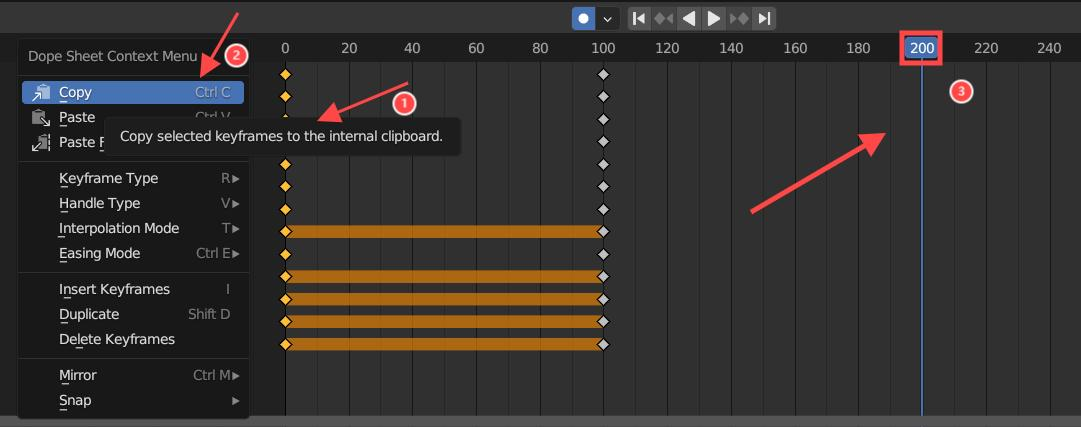 | 为什么呢?这是因为“趴下”姿势的重心是朝后的,直接起来哮天会朝后方使力导致不能站起,所以我们需要在“趴下”到“站立”的姿势中间再加一个过渡姿势,使哮天重心先前移在起身。 |
| 第二步:参考标注一将播放头移动到150帧的位置。 | 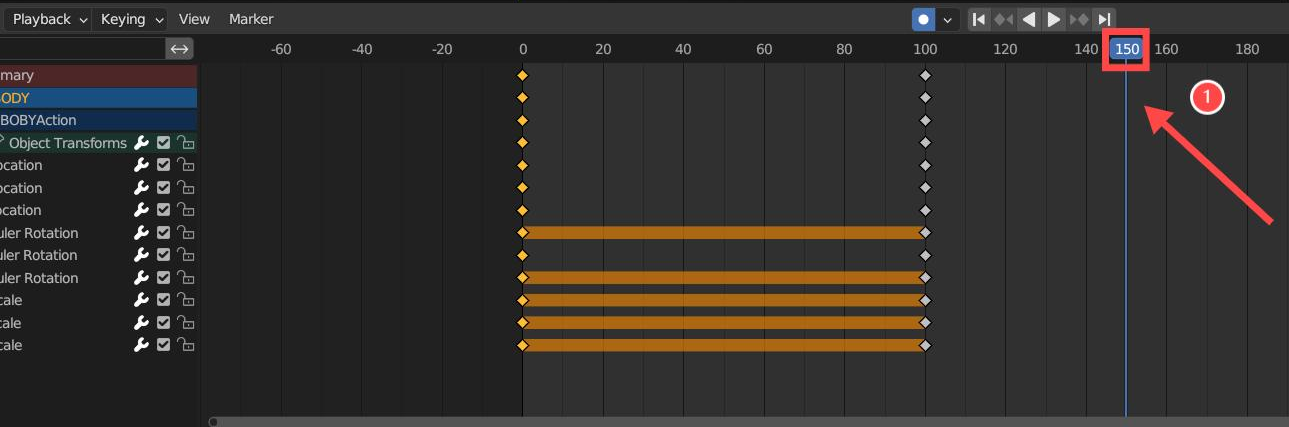 | |
第三步(恢复机身平衡):标注一切换至旋转模式,标注二选中正四棱柱,拖动标注二绿色圆圈将机身恢复平衡。注释:标注三:演示参数。 | 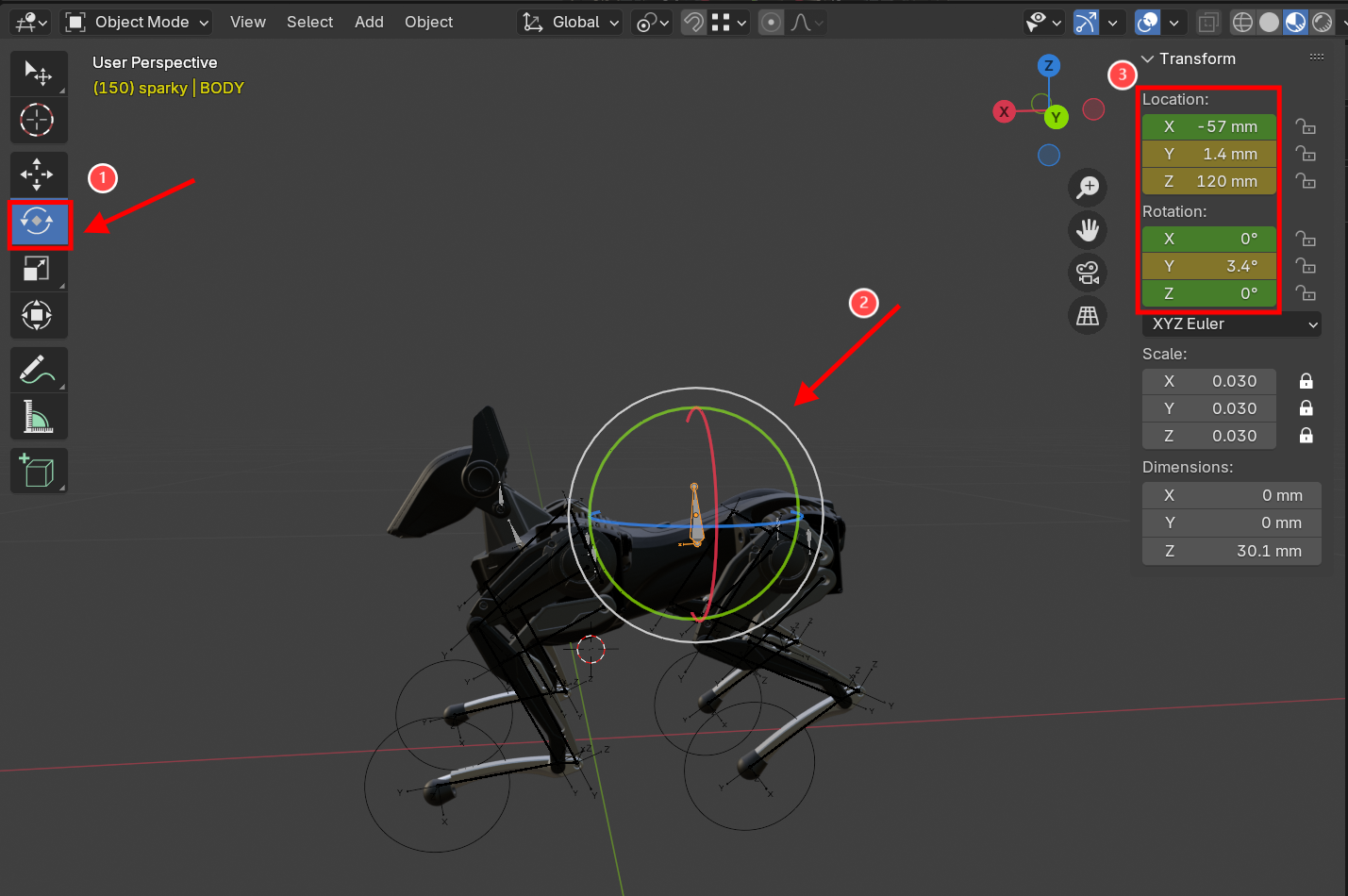 | 但只恢复平衡的话,我们会发现哮天还是不能完全站起,此时需要将机身重心前移。 |
第四步:标注一切换到移动模式,再选择标注二正四棱柱,拖动红色箭头将机身向前移动。注释:标注三(演示参数) 注意:移动的“多少”,用户可进行多次实验或参考演示参数,哮天向前移动较少会出现站不起来的现象,而过多则会向前翻到。 | 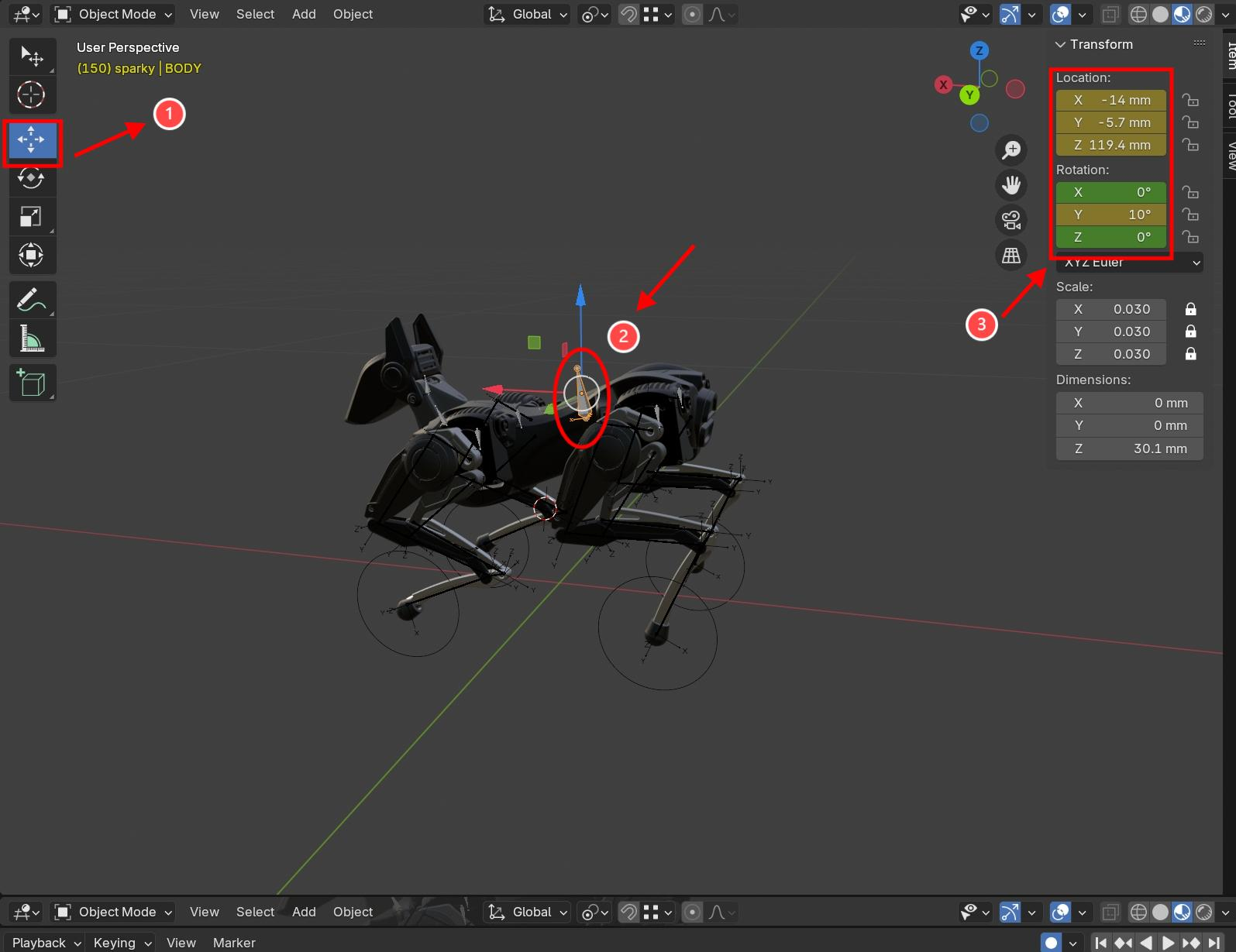 | |
| 第五步:来验收学习成果了!根据标注一将蓝色块定位在0帧,点击标注二“播放键”看看效果。 | 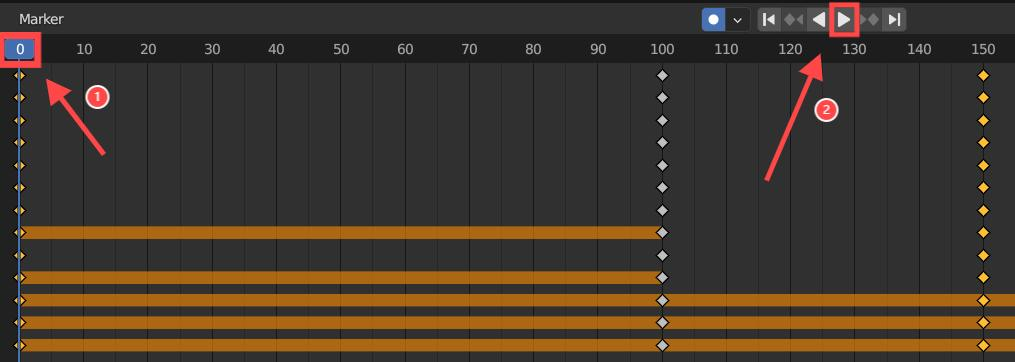 | 视频待补 |
随着文档学习到这里后,关于哮天如何在 Blender 上一整组从“站立”到“趴下”再到“站立”的动作编排已经结束了,您基本已经熟悉基础操作流程,此时可以尝试自行给您的哮天编排专属炫酷动作了。
4.3 Blender 使用参考
如您需要 Blender 软件更详细的基础操作以及学习更多,请查看官方教程:Blender 4.3 Manual
| 功能 | 示例图 |
|---|---|
| 基础页面 | 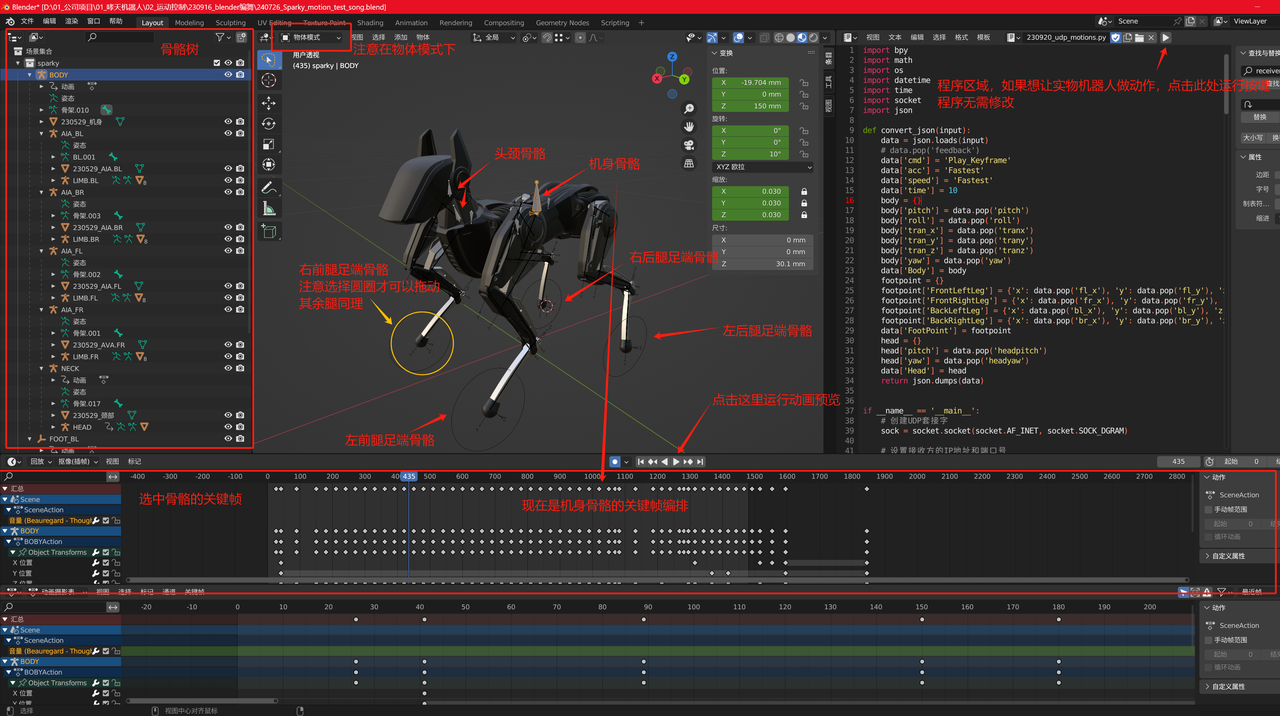 |
| 常用窗口 | 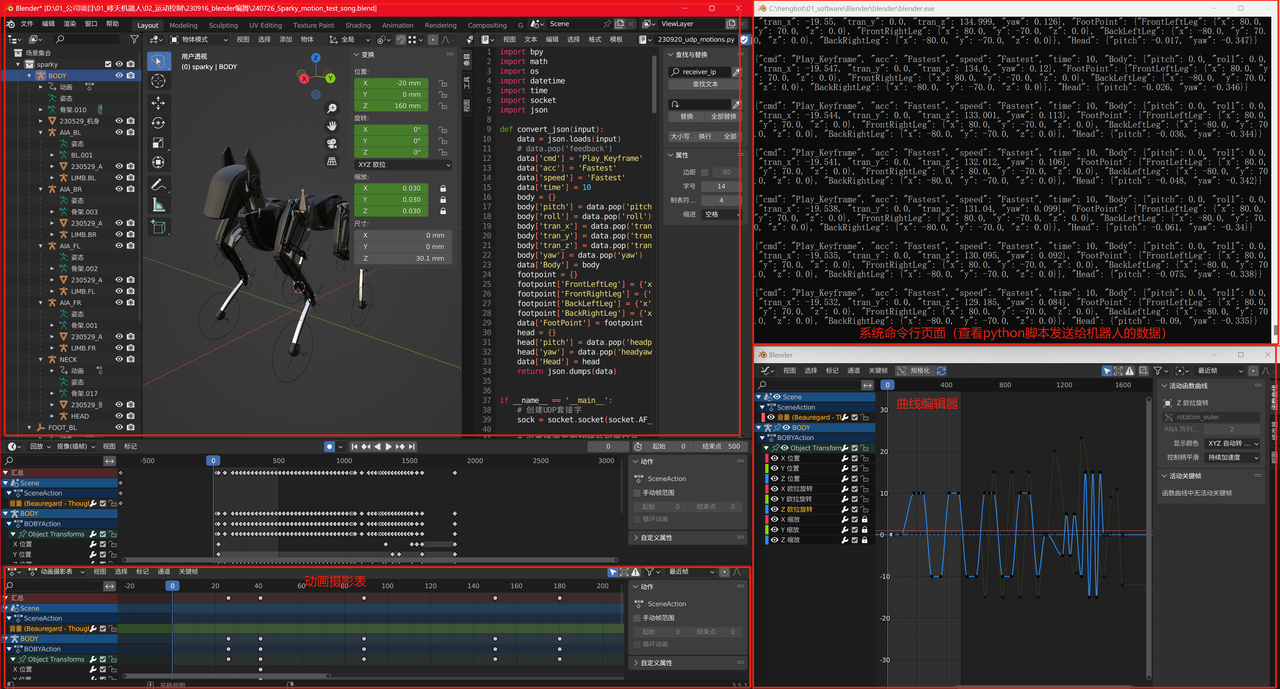 |
| 音频添加方法 | https://www.bilibili.com/video/BV1EY411j7bX/?vd_source=0d699efa3ba99bd10455fd93c3d9b1b1 |
五、使用 Python 播放动作组
前文我们学习了如何编排动作的基础技巧后,您可能希望将这些动作应用于本地环境,并让 AI 大模型进行调度这些动作。为此,我们借助了 Blender 的导出功能,让您可以将动作导出为文件,并通过 Python 代码实��现本地化运行。接下来,将一起来学习如何使用这些工具来分享、上传和下载您精心编排的动作。
使用视频代补
5.1 Python 准备工作
5.1.1 安装Python
| 操作步骤 | 示意图 |
|---|---|
第一步:点击Python安装包下载最新版本的软件。 |  |
| 第二步:根据标注一将安装界面下方选项全勾选,标注二点击“Install Now”进行安装。如果忘记勾选,请卸载Python软件重装。 | 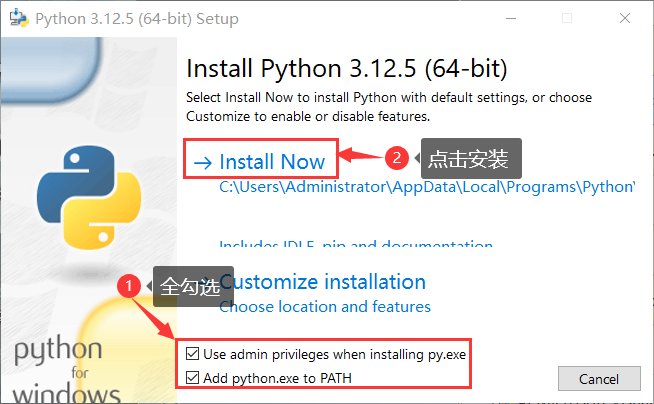 |
5.1.2 配置Python环境
| 操作步骤 | 示意图 |
|---|---|
第一步:按下 Windows键 + R键 打开“运行”对话框,输入 cmd 然后按确定键。 | 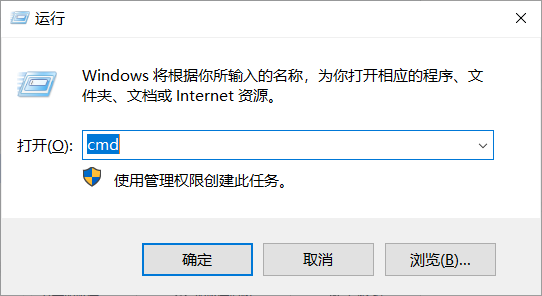 |
第二步:确定后会弹出命令行窗口,输入右侧命令行:pip install numpy hengbot-api -i https://pypi.tuna.tsinghua.edu.cn/simple 敲下Enter键运行确定。 | 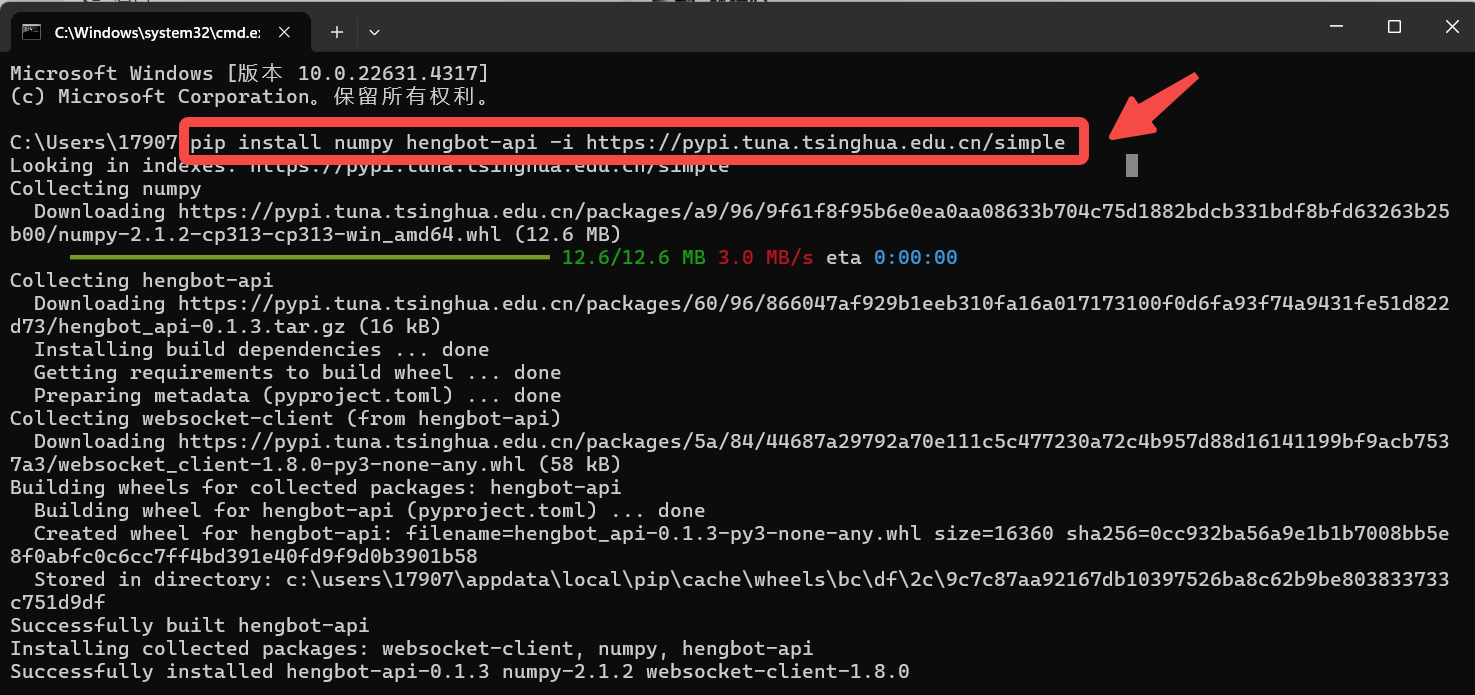 |
5.1.3 创建Python文件
前文已安装好 Python 并配置好相关开发环境,下一步则是学习如何创建 Python 程序方便我们自行后续修改。
#Python播放哮天动作
from hengbot import Sirius
# set IP
IP = '192.168.8.154'
def test_play_frame(ip):
import time
# connect through ip
with Sirius.robot_control(ip) as robot:
# switch to edit mode and return to edit mode operation object
edit = robot.switch_mode(Sirius.MODE_EDIT)
# play action frame
edit.play('./20240808_Shaking_your_head.txt')
input("回车退出")
test_play_frame(IP)
| 操作步骤 | 示意图 |
|---|---|
| 第一步:新建文件夹存储相关文件,方便后续寻找使用,命名均可自定义或复用文档示例。 | 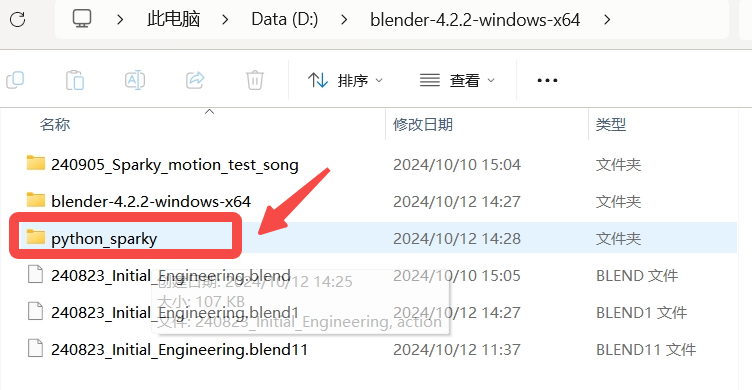 |
| 第二步:打开 Python IDLE。 |  |
| 第三步:点击标注一的 File 后创建新文件,点击标注二的 New File新建 Python文件。 | 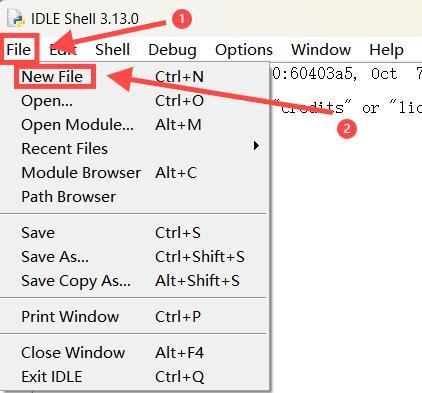 |
第四步:将上文代码复制到新建的Python文件中,点击标注一 File->Save 来进行保存,将其保存在新建 Python_sparky 文件夹里(标注二),并使用纯英文和数字作为文件名(标注三),避免Python程序无法识别。 | 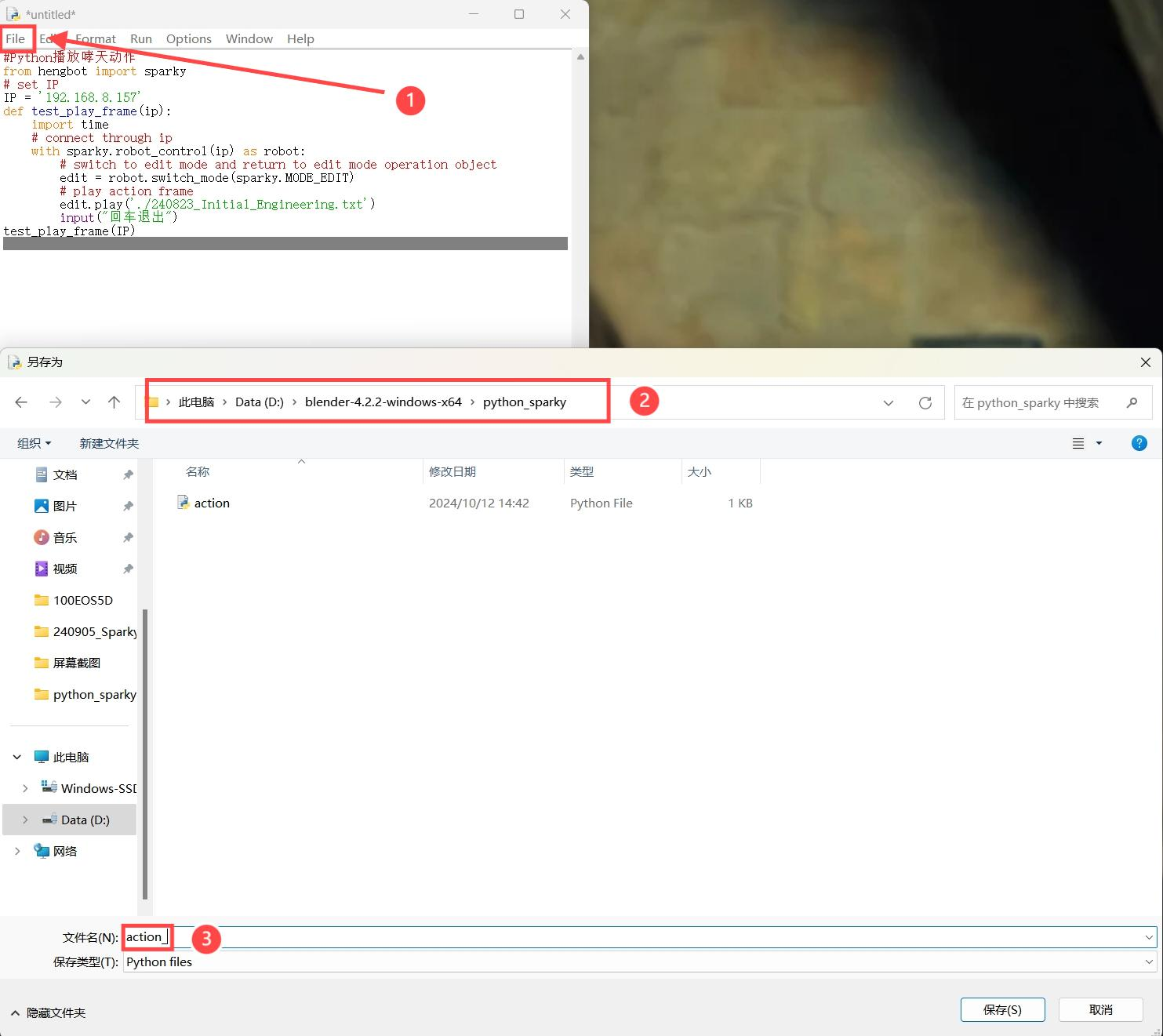 |
5.2 导出并检查Blender文件
我们先使用Blender导出动作文本文件,以供Python播放使用。
| 操作步骤 | 示意图 |
|---|---|
| 第一步:根据标注一二切换至240823_udp_motions.py代码里,参考标注三找到324行修改程序文件名,再根据标注四启动运行,系统会自动保存文本。 | 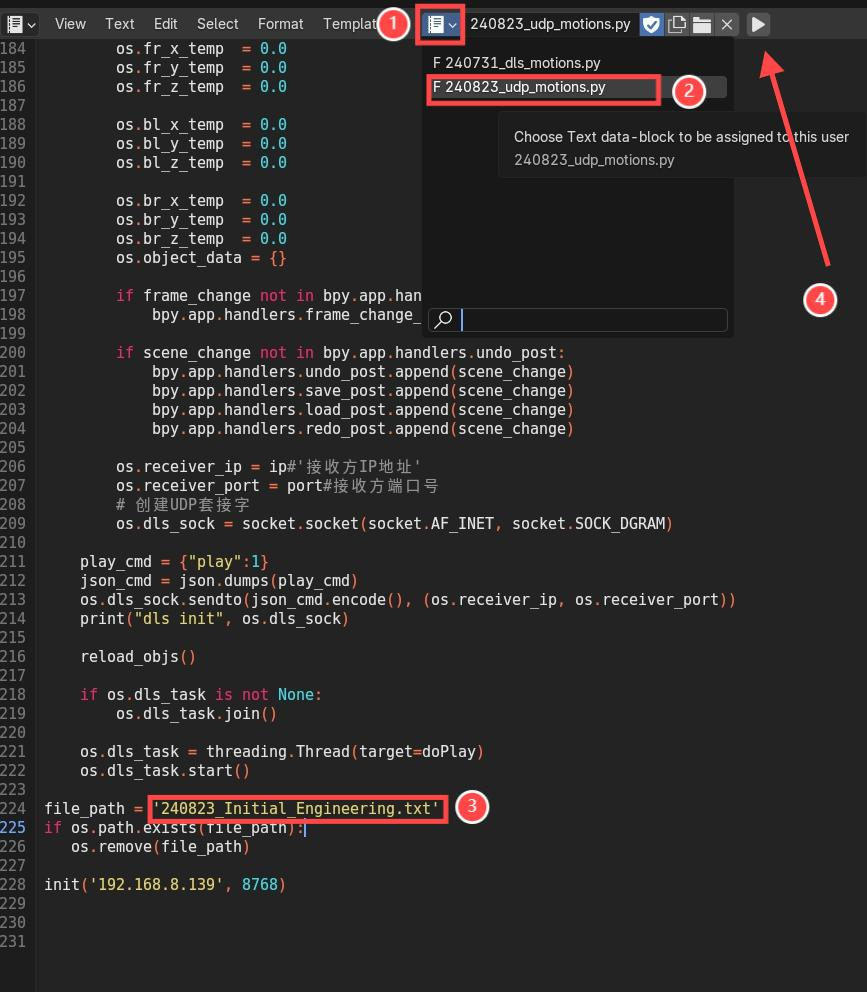 |
第二步:前文建议工程包与 Blender 程序放置同一目录下,此时请回目录下找到并打开以 txt 后缀的文本,我们需要检查导出的动作文本文件的行数是否和结束帧一致,避免重复动作。 | 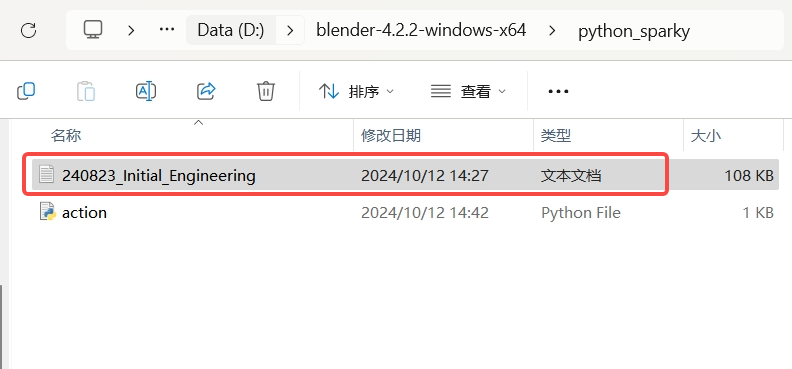 |
| 第三步:根据标注一二将滑条拉到最下方,选中最后的大括号,查看总行数。 | 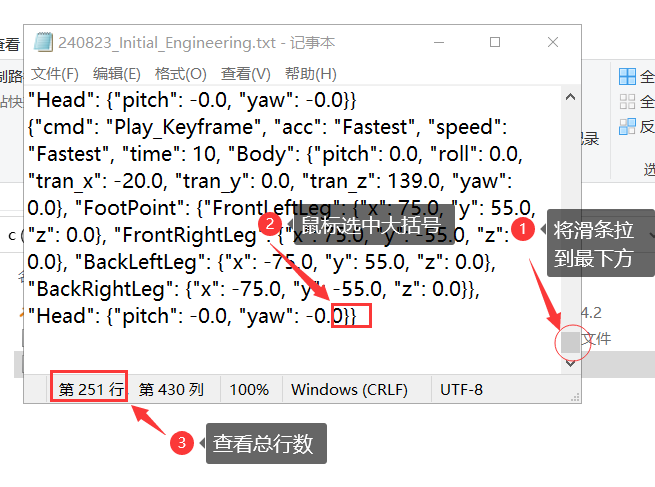 |
| 第四步:每次播放完,播放头所在的位置即是结束帧,下面红框位置为结束帧。对比结束帧和总行数是否一致(因为起始帧是从第0帧开始的,所以总行数看起来会比结束帧多一帧或少一帧) |  |
完成对文本文件的导出与检查后,我们可以来尝试用 Python 播放程序。
5.3 使用 Python 播放动作
若想播放另一个动作,需要当前动作执行完后,再重新执行python程序进行播放操作。
| 操作步骤 | 示意图 |
|---|---|
第一步:先找到刚保存的 action.py文件,在标注一位置将 IP 修改为哮天头部的 IP 地址。再到标注二位置将文本名修改为导出的 txt 文件名。(注意:此 action.py 以及 txt 文件都是同一目录下的。) | 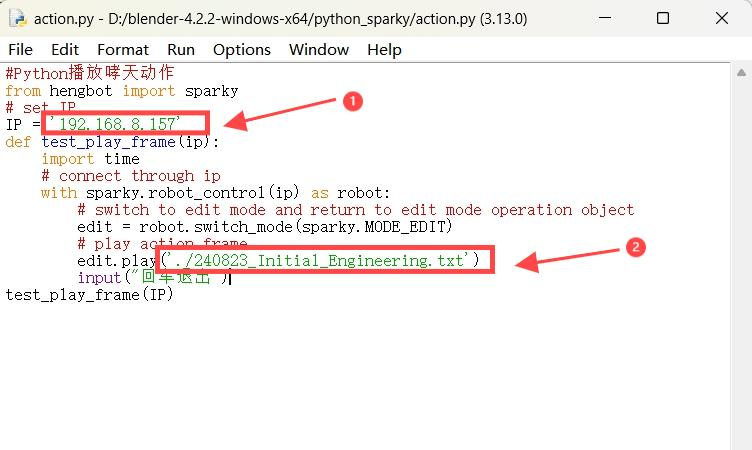 |
第二步:点击标注一 Run 再点击标注二 Run Module 来运行 Python 程序。 | 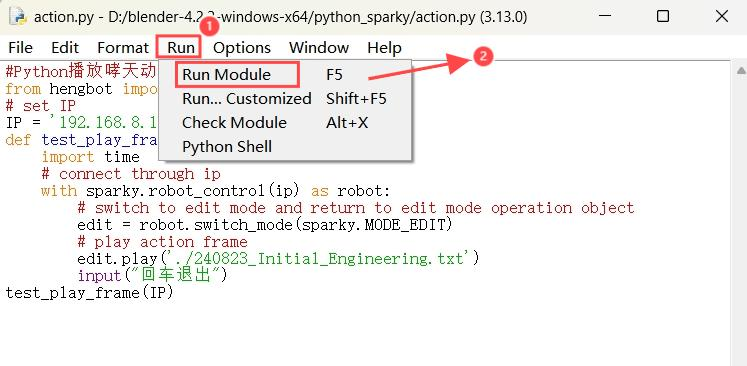 |
| 第三步:运行后 Python 窗口会显示已运行程序,哮天本地运行效果如右侧视频。 | 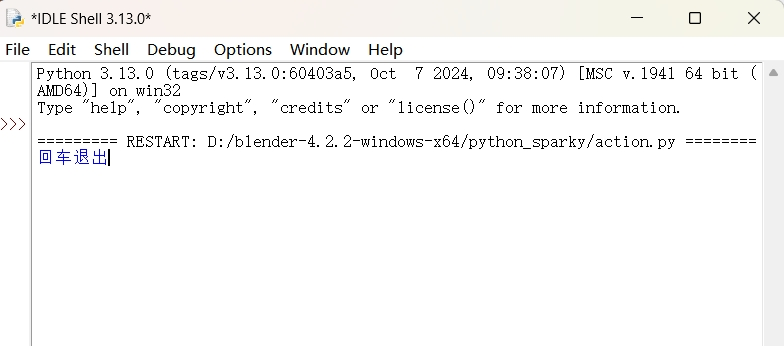 |
效果视频待补
六、常见问题处理
6.1 Q:Python 程序出现无法连接的报错,如何解决?
Traceback (most recent call last):
File "D:\桌面\Python播放动作\action.py", line 14, in <module>
test_play_frame(IP)
File "D:\桌面\Python播放动作\action.py", line 10, in test_play_frame
edit = robot.switch_mode(Sirius.MODE_EDIT)
File "C:\Users\Administrator\AppData\Local\Programs\Python\Python312\Lib\site-packages\hengbot\Sirius.py", line 116, in switch_mode
self.ws.send('{"cmd": "Mode_Switch", "target": "' + target + '"}')
File "C:\Users\Administrator\AppData\Local\Programs\Python\Python312\Lib\site-packages\websocket\_app.py", line 290, in send
if not self.sock or self.sock.send(data, opcode) == 0:
File "C:\Users\Administrator\AppData\Local\Programs\Python\Python312\Lib\site-packages\websocket\_core.py", line 297, in send
return self.send_frame(frame)
File "C:\Users\Administrator\AppData\Local\Programs\Python\Python312\Lib\site-packages\websocket\_core.py", line 337, in send_frame
l = self._send(data)
File "C:\Users\Administrator\AppData\Local\Programs\Python\Python312\Lib\site-packages\websocket\_core.py", line 559, in _send
return send(self.sock, data)
File "C:\Users\Administrator\AppData\Local\Programs\Python\Python312\Lib\site-packages\websocket\_socket.py", line 152, in send
raise WebSocketConnectionClosedException("socket is already closed.")
websocket._exceptions.WebSocketConnectionClosedException: socket is already closed.
A:确认哮天是否开机
- 检查哮天和电脑是否在同一局域网。
- 检查哮天屏幕IP和Python文件IP是否一致。
6.2 Q:Python 程序出现无法找到这个文件的报错,如何解决?
Traceback (most recent call last):
File "D:\桌面\Python播放动作\action.py", line 14, in <module>
test_play_frame(IP)
File "D:\桌面\Python播放动作\action.py", line 12, in test_play_frame
edit.play('./240823_Initial_Engineerin.txt')
File "C:\Users\Administrator\AppData\Local\Programs\Python\Python312\Lib\site-packages\hengbot\Sirius.py", line 451, in play
with open(path, 'r', encoding='utf-8') as f:
FileNotFoundError: [Errno 2] No such file or directory: './240823_Initial_Engineerin.txt'
A:检查Blender导出的文件是否放置 Python 文件目录下。
- 检查 Python 文件中文本名是否与 Blender 导出的文件名一致。
![]()
6.3 Q:Python 程序运行后哮天会蹦一下,如何解决?
A:动作执行完后,在IDLE Shell窗口按Enter键七次左右,再运行程序。
6.4 Q:Python程序出现无法找到“numpy”和“hengbot-api”的报错,如何解决?
- 按
window+R键打开“运行”对话框,输入cmd,然后按确定键。 在命令行窗口执行以下命令行。
pip install numpy hengbot-api -i https://pypi.tuna.tsinghua.edu.cn/simple