基础系列:APP 玩法
一、前言
前文、我们介绍了新伙伴“哮天”,并熟悉了包括联网和 App 连接在内的配置操作。现在,我们已经熟悉了这些设置。接下来,让我们一起探索 App 的有趣玩法,首先是学习如何控制哮天的步态、头部、机身运动等。"

二、准备工作
| 步骤 | 详细介绍 |
|---|---|
| 软件:下载好 APP 并根据提示安装 |  |
| 环境:哮天已联网并已成功连接手机 app | 此文档不再对基础配置等使用操作进行阐述,相关资料请参考此文档:开箱系列:基础配置使用 |
三、体验 APP 基础玩法
| 步骤 | 示例图 |
|---|---|
| 连接成功后 APP 会直接进入首页,点击“进入遥控” 开启体验您与哮天的奇妙互动。 |  |
| 进入遥控模式后,会弹出是否 "恢复初始姿态" 的提醒,点击 “确定” 后即可。 |  |
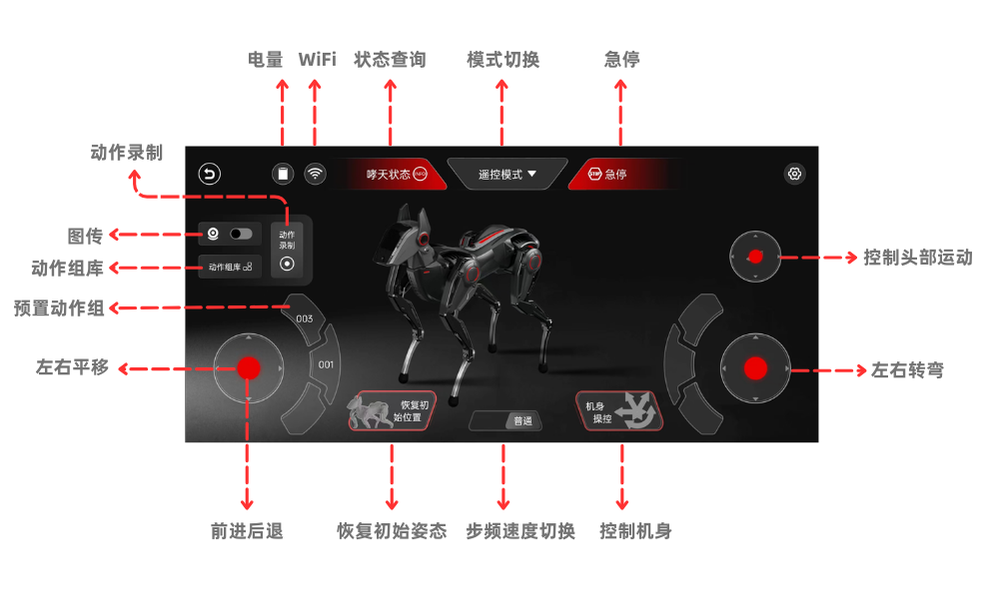
3.1 功能标注图
先根据标注图了解各类组件及图标的作用,熟悉后接着往下体验哮天的步态运动。
3.2 体验步态运动
| 操作步骤 | 示例图 |
|---|---|
| 标注一:滑动摇杆让哮天动起来实现步态运动,标注二:切换速度模式 “普通/急速” 来控制哮天的步态速度。 |  |
在了解完基础的操作步骤后,您可以一边观看视频更直观的看到操作步骤,一边来体验哮天的步态运动。
| 功能 | 视频效果 |
|---|---|
| 左摇杆:控制四足:向上(前进 向下(后退)/ 左右滑动可控制平移 | |
| 右摇杆:实现左右方向转弯 | |
| 双摇杆结合步态:控制步态速度:普通/急速 |
3.3 体验头部运动
| 操作步骤 | 示例图 |
|---|---|
| 标注一:头部滑杆 此次头部单独做了摇杆控制的优化,用户能够更精细地控制头部运动。 |  |
在熟悉完基础操作步骤后,您可以通过观看视频来亲身体验哮天的头部运动。
为了进一步加深理解,下文的表格将对这些功能进行详细的标注和介绍。
| 工具 | 用途 | 使用方法 |
|---|---|---|
| 头部滑杆 | 实现头部俯仰及偏航运动 | 上下滑动:实现俯仰(抬头低头);左右�滑动:进行偏航运动(左右摇头) |
| 头部图传 | 头部图传模块暂未开放,敬请期待。 |
3.4 体验机身运动
| 操作步骤 | 示例图 |
|---|---|
| 标注一:进入机身操控页面,调整参数轴来实现机身运动。 |  |
| 标注二:滑动红点进行调整参数轴;标注三:点击参数轴两侧的“-”来减少或“+”来增加。 | 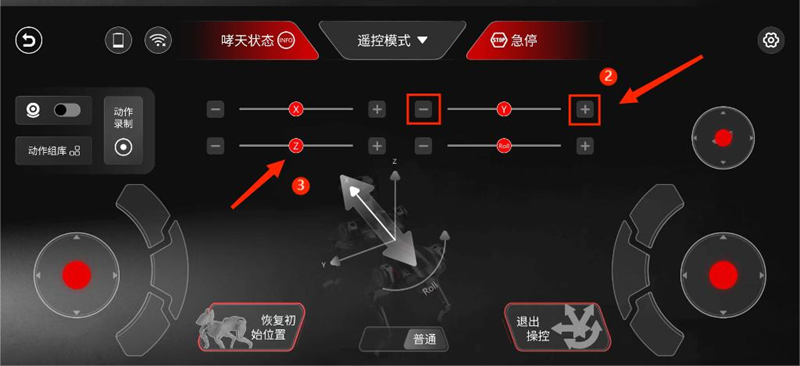 |
在熟悉完基础操作步骤后,您可以通过观看视频来亲身体验哮天的机身运动。
为了进一步加深理解,下文的表格将对这些功能进行详细的标注和介绍。
| 名称 | 用途(滑动或调整“-”“+”按键使用) |
|---|---|
| 示意图 |  |
| Roll | 机身绕 X 轴做左右滚转运动 |
| Z轴 | 腿部绕 Z 轴实现蹲下或站立姿态 |
| Y轴 | 机身绕 Y 轴进行偏航运动 |
| X轴 | 机身绕 X 轴实现俯仰运动 |
四、更多玩法
通过上文的玩法介绍,我们熟悉了 APP 的基础遥控玩法,学习了控制哮天的步态、头部和机身运动等技巧。而接下来准备更进一步,探索 APP 中的进阶遥控玩法——关键帧及拖拽示教。让我们共同期待下一章的精彩内容吧。敬请期待!
您可根据下文的导读区去往您需要的文档区。
| 文档 | 导读 |
|---|---|
| 开箱系列:基础配置使用 | 在本文中,我们将带您了解哮天的基础配置和使用方法。这包括启动步骤、操作技巧、联网指南以及如何与 APP 进行连接等各项操作流程。 |
| 快速使用系列:手柄遥控 | 本文档详细介绍了如何快速将哮天与蓝牙手柄配对,以便通过遥控操作实现更流畅的步态、头部和机身运动。 |
| 基础系列(一):UI 界面使用 | 本文档介绍了哮天头部的 UI 基本界面与交互操作。 |
| 基础系列(二):基础遥控玩法 | 本文档为您介绍了App的基础遥控玩法,涵盖从基础操作到步态运动,头部和机身运动等各个方面。让我们一起探索 App 中的各种有趣玩法吧! |
| 探索系列(一):进阶遥控玩法 | 在这里我们将更进一步,探索 APP 中的进阶遥控玩法——关键帧模式及拖拽示教,来为您的哮天创造更多独一无二的动作吧! |
| 探索系列(二):Python API | 本篇文档介绍了如何使用 python sdk 控制哮天的运动状态。您可以按照我们提供的接口和例程,尝试用 Python 来学习机器人控制,完成哮天的二次开发。 |
| 探索系列(三):WebSocket API | 本篇文档介绍了如何使用 WebSocket API 来控制哮天的运动状态,完成哮天的二次开发以及更详细的 API 资料。 |