拓展系列(一):UI 界面使用
一、前言
我们将在这介绍哮天头部 UI 界面,它的头部不仅是其视觉和交互的核心,还集成了一个功能丰富的用户界面(UI),以及来自 HENGBOT 研发人员的惊喜彩蛋。
二、UI 界面
2.1 使用技巧
首先我们来介绍一些通用的玩法技巧,帮助大家快速上手。
| 技巧 | 使用 | 示例图 |
|---|---|---|
| 进入交互页面后所有的操作 | 只需通过哮天左右耳的按钮选择“退出”或“进入”,并通过轻触头顶区域确认即可。 |  |
2.2 颜色识别
颜色识别通常涉及到图像处理和机器学习技术,颜色识别就像是给哮天一个“调色板”,使其不仅能够看到图像中的颜色,并且能够识别出特定的颜色,并将用户感兴趣的颜色进行标记。
要体验颜色识别功能,您可以按照以下步骤进行:
| 操作步骤 | 示例图 |
|---|---|
| 第一步:选择颜色识别:在“更多功能”菜单中,使用按键选择“颜色识别”功能。并通过触摸头顶来开启功能。 |  |
| 第二步:准备识别对象:功能启动后,准备一个红色的球或红色纸盒。确保该物体完全处于头部摄像头的视野范围内,以便哮天能够自动进行颜色识别跟随。 |
如果您需要识别其他颜色,您可能需要自行更改后台脚本,以适应不同的颜色识别需求。
2.3 自平衡
自平衡(Self-Balancing)是指一个系统或设备能够自动调整其姿态或位置,以保持稳定状态的能力;想象一下就像是哮天拥有了自己的“平衡感”;当它站立时,无论是被轻轻推动还是自己微调位置,它体内的系统会迅速感知到这些变化,并通过精细调整腿部动作来恢复平衡。
要观察哮天在不同动作下如何实现自平衡姿态,请按照以下步骤操作:
| 操作步骤 | 示例图 |
|---|---|
| 第一步:选择自平衡功能:在“更多功能”菜单中,使用按键选择“自平衡”功能。并通过触摸头顶来开启这一功能。 |  |
| 第二步:单腿抬起测试:轻轻抬起哮天的单腿,观察它的其他三条腿如何缓慢而稳定地调整位置,以保持整个机身的平衡。 | |
| 第三步:双腿抬起测试:尝试同时抬起哮天的前左腿和前右腿,观察它的后腿如何巧妙地降低高度并抬起屁股,以保持整体的平衡。 | |
| 第四步:自定义平衡动作:现在,您可以自由尝试您想让哮天保持平衡的动作。 |
这些步骤不仅帮助您了解哮天的自平衡能力,还能让您探索更多创造性的玩法。但记得在进行测试时,请确保哮天处于安全的环境中,避免因失去平衡而造成损伤。
2.4 自由模式
如何开启自由模式,您可以按照以下步骤进行操作:
| 操作步骤 | 示例图 |
|---|---|
| 第一步:选择自由模式:在“更多功能”菜单中,再次使用左右耳按键选择“自由模式”选项。确认选择后,通过触摸头顶来开启这一功能。 |  |
| 第二步:体验自由模式:开启自由模式后,哮天会像观察者一样注视您,头部会随着您的脸部移动而移动。同时,它的腿部会处于半卸力的自平衡状态,即使有小幅度的碰撞或挤压,也不必担心会对机器狗造成影响。 |
视频
2.5 遥控模式
遥控模式是哮天头部 UI 界面的核心功能之一,专为实现哮天(Sirius)的远程操控而设计。在这个模式下,用户可以进行联网设置、以及实现 Sirius's App 与哮天的连接、以及使用 WebSocket API 接口进行更深层次的开发。
| 操作步骤 | 示例 |
|---|---|
| 直接在主菜单选择 “遥控模式” 选项。确认选择后,通过触摸头顶来开启这一功能。 |  |
2.6 开发者模式
| 介绍 | 示例图 |
|---|---|
| 开发者模式是给想深层编程和二次开发的开发者设计的。一旦启用,哮天头部 UI 程序将被中止,以便开发者可以使用 HENGBOT 提供的 API 接口文档,并通过 Python 等编程语言实现自己的创新想法。 |  |
2.7 头部更多设置
| 介绍 | 示例图 | 视频 |
|---|---|---|
| 设置里预置了 WIFI、音量、系统自检、系统信息、以及返回上一级五个选项可供用户调整。 |  |
| 功能 | 介绍 | 示例图 |
|---|---|---|
| 如何开启 WIFI 联网 | 除开机时自动联网页面,还可通过手动开启 WIFI 连接,联网操作一致。 |  |
| 如何调节音量 | 我们可通过调节音量来控制哮天叫声的大小。 |  |
| 如何进行系统自检 | 开启后会自动对硬件 IMU、KEY、Battery、WiFi Driver、Motor Servo 进行自检,确保在所有硬件无任何问题的前提下,再去体验软件功能。 | 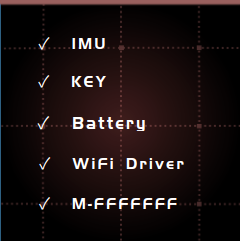 |
| 检查系统信息 | 开启后哮天会自动对系统信息进行读取 |  |
体验到这里后,大家应该对哮天有了基础的了解及认知,开箱指南到这里结束啦,请尽情探索其他有趣的花样玩法吧!